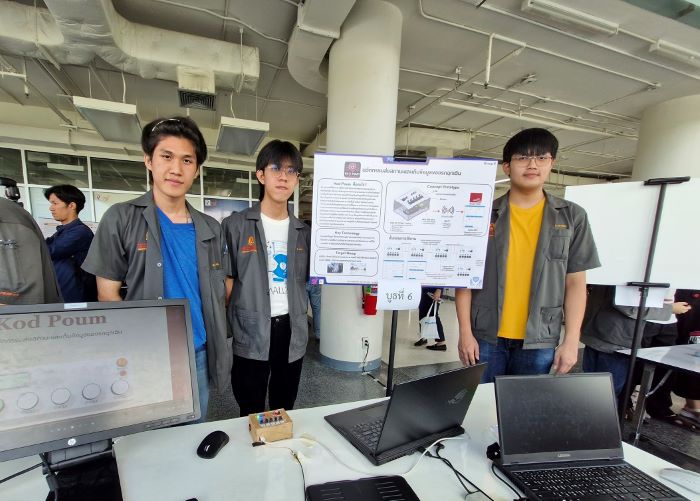
การจะทำให้รถพยาบาลฉุกเฉินสามารถนำส่งผู้ป่วยหรือผู้ประสบอุบัติเหตุไปถึงสถานพยาบาลได้เร็วที่สุด โดยเฉพาะกับสถานพยาบาลที่มีเครือข่ายโรงพยาบาลหลาย ๆ แห่ง และมีจุดให้บริการรถพยาบาลกระจายไนหลายพื้นที่ จำเป็นต้องมีการนำข้อมูลการปฏิบัติงานของรถพยาบาลที่เกิดขึ้นทั้งในอดีตและปัจจุบัน มาวิเคราะห์เพื่อกำหนดพื้นที่ให้บริการของรถพยาบาลแต่ละจุดให้ครอบคลุม และมีประสิทธิภาพ จึงเป็นที่มาของ “Kod Poum” หรือ “กดปุ่ม” นวัตกรรมส่งสถานะและเก็บข้อมูลของรถพยาบาลฉุกเฉิน ผลงานของทีมนักศึกษาชั้นปีที่ 2 สถาบันวิทยาการหุ่นยนต์ภาคสนาม (ฟีโบ้) มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี (มจธ.) จำนวน 4 คน คือ ธฤต นามนิราศภัย, พรวลัย เฉลิมวัฒนไตร, อสมา ว่านกระ และอิทธิกฤต กฤตเจริญนนท์ โดยมี ดร.อาบทิพย์ ธีรวงศ์กิจ และ ดร.บุญฑริกา เกษมสันติธรรม เป็นอาจารย์ที่ปรึกษา
ธฤต กล่าวว่า จากการได้ไปพูดคุยเก็บข้อมูลกับบุคลากรของศูนย์บริการการแพทย์ฉุกเฉินกรุงเทพมหานคร (ศูนย์เอราวัณ) ในส่วนของการให้บริการรถพยาบาลที่จะนำผู้ประสบอุบัติเหตุหรือผู้ป่วยไปส่งยังโรงพยาบาลเครือข่ายของศูนย์ฯทั้ง 12 แห่งทั่วกรุงเทพฯ นั้น พบว่ามีการกำหนดให้มีการส่งข้อมูลต่าง ๆ ขณะปฏิบัติงานของรถพยาบาล ทั้ง “ตำแหน่ง”“เวลา”“สถานะการทำงาน” ไปยังศูนย์การแพทย์ฉุกเฉิน ด้วยการรายงานผ่านระบบออนไลน์ โดยใช้แอปพลิเคชันบนแท็บเล็ตที่อยู่ประจำรถพยาบาลแต่ละคันขณะปฏิบัติหน้าที่ “เนื่องจากพนักงานขับรถแม้จะชำนาญด้านเส้นทาง แต่ส่วนใหญ่จะไม่มีความคุ้นเคยกับการใช้แอปพลิเคชัน ทำให้การกรอกข้อมูลเป็นหน้าที่ของผู้ช่วยพยาบาลที่ไปพร้อมกับรถ แต่ด้วยหน้าที่หลักที่ต้องดูแลผู้ป่วย ทำให้หลายครั้งไม่สามารถเข้าแอปเพื่อบันทึกข้อมูล ณ เวลานั้นได้ และมักจะมาบันทึกภายหลังส่งผู้ป่วยถึงโรงพยายาล ทำให้ข้อมูลหลายอย่าง เช่น ระยะเวลาที่ใช้ในการเดินทาง ระยะเวลาการดูแลผู้ป่วย ณ จุดเกิดเหตุ เวลาที่ใช้ในการเตรียมรถหลังออกปฏิบัติการ มีความคลาดเคลื่อนจากข้อมูลจริง เป็นอุปสรรคต่อการวางแผนเพื่อเพิ่มประสิทธิภาพในการปฏิบัติงาน หรือการกำหนดขอบเขตการทำงานของรถพยาบาลแต่ละจุดให้เหมาะสมยิ่งขึ้น เราจึงมีไอเดียที่จะเปลี่ยนจาก “แอปพลิเคชัน” มาเป็นอุปกรณ์เชิงกลไก (Mechanics) ที่คนขับรถพยาบาลทุกคนสามารถใช้กล่องนี้ได้”
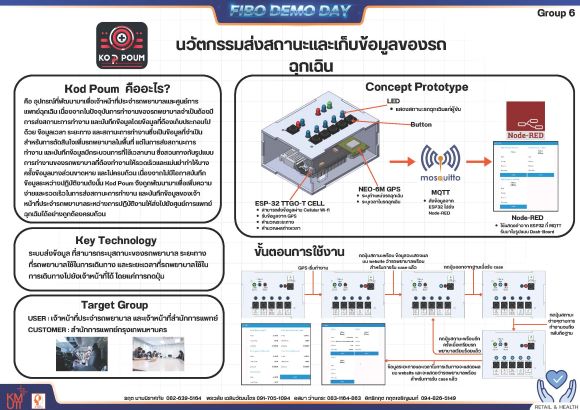
“Kod Poum หรือ กดปุ่ม” คือ กล่องสี่เหลี่ยมขนาด 12 ซม. X 8 ซม. X 6 ซม. น้ำหนักใกล้เคียงกับมือถือ ภายในประกอบด้วยอุปกรณ์ระบุตำแหน่ง (GPS) กับตัวส่งสัญญาณ ที่เชื่อมต่อกับปุ่มกดด้านบนเครื่อง เพื่อรายงาน “สถานะการปฏิบัติงาน” “พิกัดรถ” และ “เวลาปัจจุบัน” ไปยังศูนย์การแพทย์ฉุกเฉิน ได้ในเสี้ยววินาที ที่คนขับ “กดปุ่ม” “เริ่มจากปุ่มออกจากฐาน ที่ทำให้ศูนย์ฯ รู้ว่ารถคันนี้อยู่ระหว่างการเดินทางไปที่เกิดเหตุ พอไปถึงสถานที่ปฏิบัติงานก็เพียงกดปุ่มถึงที่เกิดเหตุ ต่อด้วย ปุ่มถึงโรงพยาบาล และ ปุ่มกลับถึงฐาน ตามลำดับของเหตุการณ์ที่เกิดขึ้นจริง คือเปลี่ยนจากกรอกผ่านแอพปพลิเคชันมาเป็นเพียงการ ‘กดครั้งละปุ่ม’ ที่ผู้ขับรถพยาบาลสามารถทำได้ ทำให้ผู้ช่วยพยาบาลที่ไปกับรถสามารถปฏิบัติงานช่วยเหลือผู้ป่วยได้เต็มที่ และทางศูนย์ฯ ก็ได้รับข้อมูลที่ถูกต้องสำหรับการปรับปรุงประสิทธิภาพการช่วยเหลือผู้ป่วยฉุกเฉิน” อิทธิกฤต กล่าวเสริม
ธฤต กล่าวว่า หลังจากนำ “กดปุ่ม” ไปให้เจ้าหน้าที่ของศูนย์บริการการแพทย์ฉุกเฉินกรุงเทพมหานคร (ศูนย์เอราวัณ) ในส่วนของการให้บริการรถพยาบาลได้ทดลองใช้ สิ่งที่คนขับรถพยาบาลสะท้อนมาก็คือ “ออกแบบเรียบง่าย” “ใช้งานง่าย” รวมถึงอยากให้เพิ่มเติมในส่วนอื่น ๆ เข้ามา เช่น การมีปุ่มเคลียร์สถานะ และการมีจอแสดงเวลา ขณะที่ทางเจ้าหน้าที่ศูนย์ก็บอกว่าข้อมูลที่ได้มีความครบถ้วน และสามารถนำไปใช้ในการวิเคราะห์ต่อได้ “ด้วยตัวกดปุ่ม จะทำให้มีข้อมูลที่ถูกต้อง เพื่อนำไปวิเคราะห์ว่าหากเกิดอุบัติเหตุ จุดจอดรถพยาบาลจุดใดจะใช้เวลาเดินทางเร็วที่สุด มีรถพร้อมปฏิบัติงานหรือไม่ นอกจากนี้ยังทำให้ได้ข้อมูลเพื่อนำไปปรับปรุงประสิทธิภาพการปฏิบัติงานทั้งของคนขับรถและผู้ช่วยพยาบาลประจำรถได้อีกด้วย” สำหรับต้นทุนของกล่องนี้ อิทธิกฤต กล่าวว่า ตัวต้นแบบที่ขึ้นมาใช้วัสดุอุปกรณ์ที่หาซื้อได้ในประเทศ และใช้ร่วมกับโปรแกรมของศูนย์การแพทย์ฉุกเฉินอยู่แล้ว ทำให้มีต้นทุนไม่ถึง3,000 บาทต่อเครื่อง
อาจารย์บวรศักดิ์ สกุลเกื้อกูลสุข รองผู้อำนวยการฝ่ายวิชาการ และประธานหลักสูตรวิศวกรรมหุ่นยนต์และระบบอัตโนมัติ FIBO กล่าวว่า แม้ “กดปุ่ม”เป็นผลงานในระหว่างชั้นปี แต่ก็สะท้อนหลักคิดของ FIBO ที่ต้องการสร้างคนที่สามารถเลือกใช้เทคโนโลยีที่เหมาะสมกับการแก้ปัญหาหรือความต้องการของผู้ใช้งาน “เราอยากให้เด็กมีการวิจัยและเก็บข้อมูลเชิงลึกให้ครบถ้วนทุกด้าน โดยเฉพาะกับผู้ใช้ เพื่อนำมาคิดงานที่มาตอบโจทย์คนใช้จริง ๆ เป็นสิ่งสำคัญในการพัฒนานวัตกรรมใหม่ ๆ ดังนั้นการเรียนการสอนของเราจะเน้นเรื่องของ Design Thinking และใช้ concept นี้ในการฝึกให้นักศึกษาต้องลงไปเข้าใจคนใช้งานจริง ๆ เพราะหน้าที่เราคือนำความรู้ไปตอบโจทย์คนที่ใช้งาน (user) ไม่ใช่ใส่หรือยัดเยียดเทคโนโลยีแก่ผู้ใช้อย่างเดียว เพราะสิ่งสำคัญที่สุดของนวัตกรรมคือ ‘คนต้องใช้’”
กดปุ่ม เป็นหนึ่งในชิ้นงานของนักศึกษาชั้นปีที่ 2 FIBO ในวิชา Tech Innovation ช่วงเทอม 1 ที่กำหนดให้นักศึกษาใช้ทักษะด้านการออกแบบมาพัฒนาชิ้นงานขึ้นมา 1 ชิ้น ที่ต้องสามารถแก้ปัญหาให้กับผู้ใช้จริง และผลงานชิ้นนี้ได้นำไปจัดแสดงในกิจกรรม FIBO DEMO DAY ของสถาบันวิทยาการหุ่นยนต์ภาคสนาม (ฟีโบ้) มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี (มจธ.) ในช่วงเดือนธันวาคมที่ผ่านมาอีกด้วย